Design and Characterization of the EP-Face Connector
Abstract
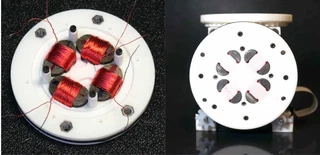
We present the EP-Face connector, a novel connector for hybrid chain-lattice type modular robots that is high-strength (88.4N), compact, fast, power efficient, and robust to position errors. The connector consists of an array of electro-permanent magnets (EP magnets) embedded in a planar face. EP magnets are solid-state magnets that can be turned on and off and require power only when changing state. In this paper, we present the design of the connector, manufacturing process, detailed experimental characterization of the connector strength under different loading conditions, and compare its performance to existing magnetic and mechanical connectors. We also illustrate the functional benefits of the EP-Face by demonstrating reconfiguration with the SMORES-EP robot.
Type
Publication
2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)

Authors
Chao Liu
(he/him)
Assistant Professor
Assistant Professor@UBC Vancouver, Postdoc@MIT CSAIL, PhD@UPenn GRASP