A Quadratic Programming Approach to Modular Robot Control and Motion Planning
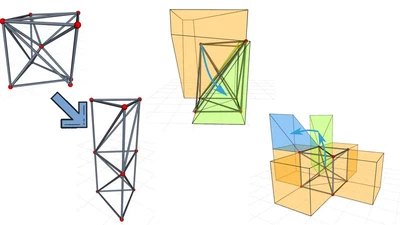
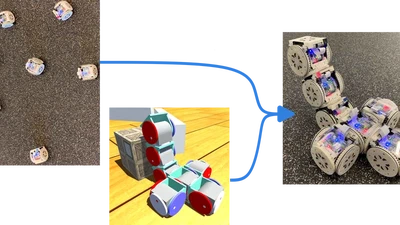
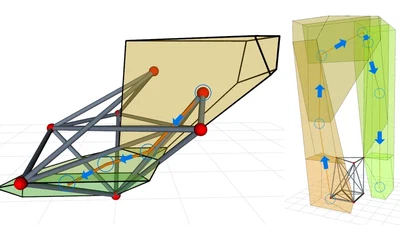
Modular robotic systems consist of multiple modules that can be transformed into different configurations with respect to different needs. Different from robots with fixed geometry …