RealTwin: Concept Graph Representation and Grounding Framework for Reality-Preserving Digital Twin Reconstruction
A novel approach combining Y and Z for state-of-the-art results.
zisu-li
A novel approach combining Y and Z for state-of-the-art results.
Differentiable simulation has become a powerful tool for system identification. While prior work has focused on identifying robot properties using robot-specific data or object …
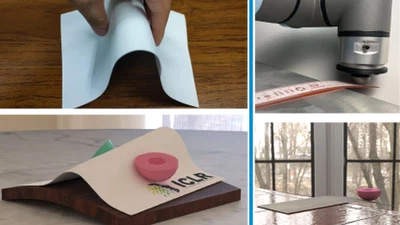
In this work, we aim to teach robots to manipulate various thin-shell materials. Prior works studying thin-shell object manipulation mostly rely on heuristic policies or learn …
Modeling and analyzing object and shape has been well studied in the past. However, manipulation of these complex tools and articulated objects remains difficult for autonomous …
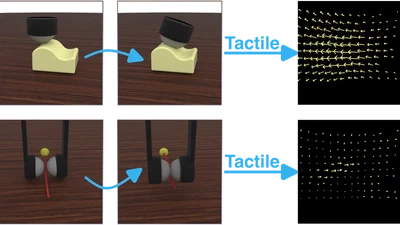
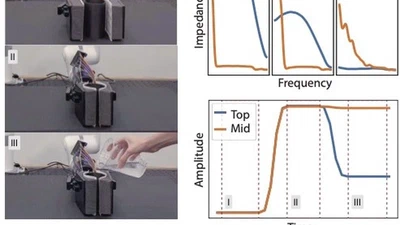
We introduce DIFFTACTILE, a physics-based differentiable tactile simulation system designed to enhance robotic manipulation with dense and physically accurate tactile feedback. In …
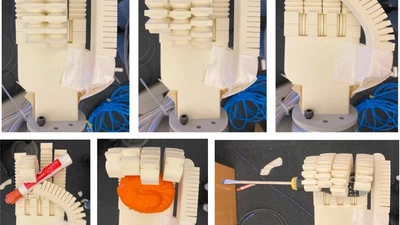
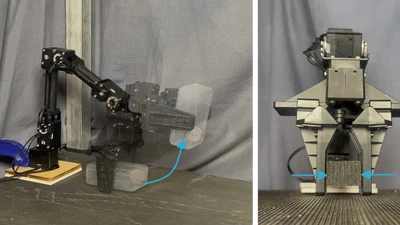
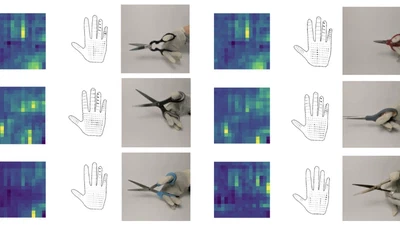
Soft robotic manipulators with many degrees of freedom can carry out complex tasks safely around humans. However, manufacturing of soft robotic hands with several degrees of …
Despite recent exponential advancements in computer vision and reinforcement learning, it remains challenging for robots to interact with liquids. These challenges are particularly …
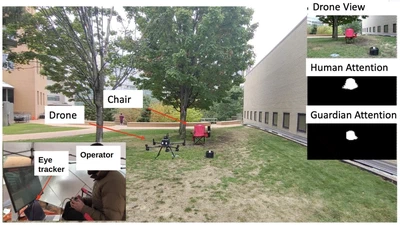
The cooperation of a human pilot with an autonomous agent during flight control realizes parallel autonomy. We propose an air-guardian system that facilitates cooperation between a …

While parallel grippers and multi-fingered robotic hands are well developed and commonly used in structured settings, it remains a challenge in robotics to design a highly …

This paper introduces ActionSense, a multimodal dataset and recording framework with an emphasis on wearable sensing in a kitchen environment. It provides rich, synchronized data …