Abstract
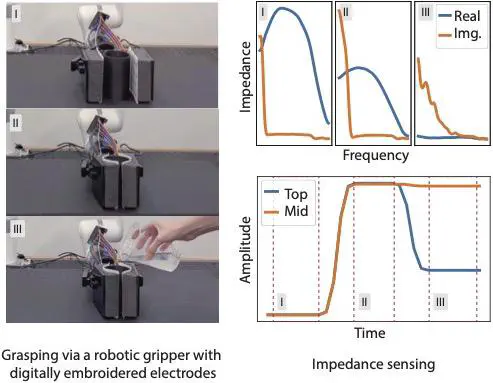
Despite recent exponential advancements in computer vision and reinforcement learning, it remains challenging for robots to interact with liquids. These challenges are particularly pronounced due to the limitations imposed by opaque containers, transparent liquids, fine-grained splashes, and visual obstructions arising from the robot’s own manipulation activities. In this work, we present a novel approach for liquid class identification and state estimation leveraging electrical impedance sensing. We design and mount a digitally embroidered electrode array to a commercial robot gripper. Coupled with a customized impedance sensing board, we collect data on liquid manipulation with a swept frequency sensing mode and a frequency-specific impedance measuring mode. Our developed learning-based model achieves an accuracy of 93.33% in classifying 9 different types of liquids (8 liquids + air), and 97.65% in estimating the liquid state. We investigate the effectiveness of our system with a series of ablation studies. These findings highlight our work as a promising solution for enhancing robotic manipulation in liquid-related tasks.
Chao Liu 刘超
Assistant Professor
My research interests include manipulation and tactile sensing, swarm and modular robotics, hybrid soft-rigid robotics, parallel robotics, control and motion planning.