Abstract
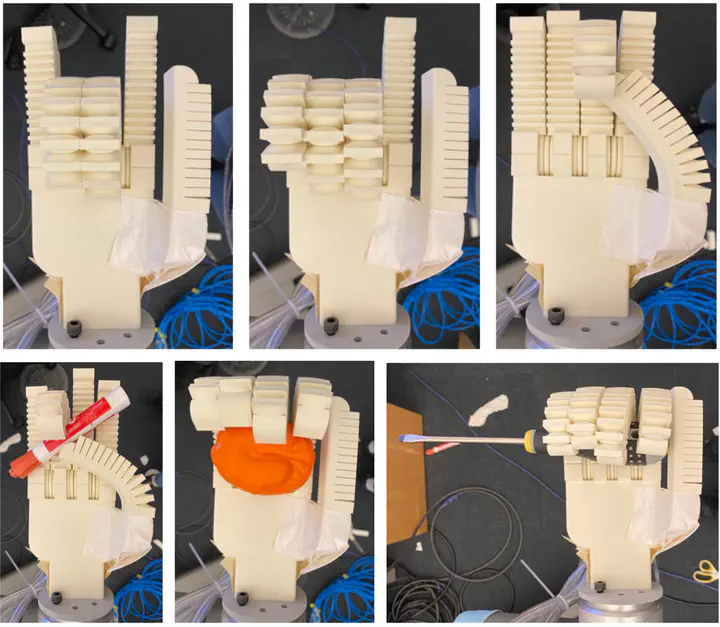
Soft robotic manipulators with many degrees of freedom can carry out complex tasks safely around humans. However, manufacturing of soft robotic hands with several degrees of freedom requires a complex multi-step manual process, which significantly increases their cost. We present a design of a multi-material 15 DoF robotic hand with five fingers including an opposable thumb. Our design has 15 pneumatic actuators based on a series of hollow chambers that are driven by an external pressure system. The thumb utilizes rigid joints and the palm features internal rigid structure and soft skin. The design can be directly 3D printed using a multi-material additive manufacturing process without any assembly process and therefore our hand can be manufactured for less than 300 dollars. We test the hand in conjunction with a low-cost vision-based teleoperation system on different tasks.
Chao Liu 刘超
Assistant Professor
My research interests include manipulation and tactile sensing, swarm and modular robotics, hybrid soft-rigid robotics, parallel robotics, control and motion planning.