Motion Planning for Variable Topology Trusses: Reconfiguration and Locomotion
Abstract
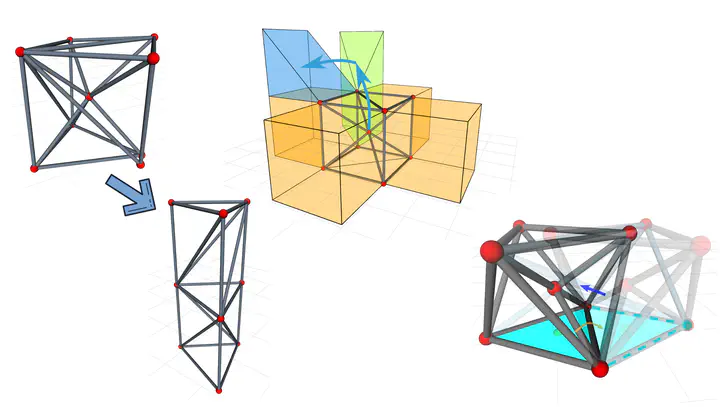
Truss robots are highly redundant parallel robotic systems that can be applied in a variety of scenarios. The variable topology truss (VTT) is a class of modular truss robot. As self- reconfigurable modular robots, a VTT is composed of many edge modules that can be rearranged into various structures depending on the task. These robots change their shape by not only controlling joint positions as with fixed morphology robots, but also reconfiguring the connectivity between truss members in order to change their topology. The motion planning problem for VTT robots is difficult due to their varying morphology, high dimensionality, the high likelihood for self-collision, and complex motion constraints. In this paper, a new motion planning framework to dramatically alter the structure of a VTT is presented. It can also be used to solve locomotion tasks that are much more efficient compared with previous work. Several test scenarios are used to show its effectiveness.
Chao Liu 刘超
Assistant Professor
My research interests include manipulation and tactile sensing, swarm and modular robotics, hybrid soft-rigid robotics, parallel robotics, control and motion planning.