A Fast Configuration Space Algorithm for Variable Topology Truss Modular Robots
Abstract
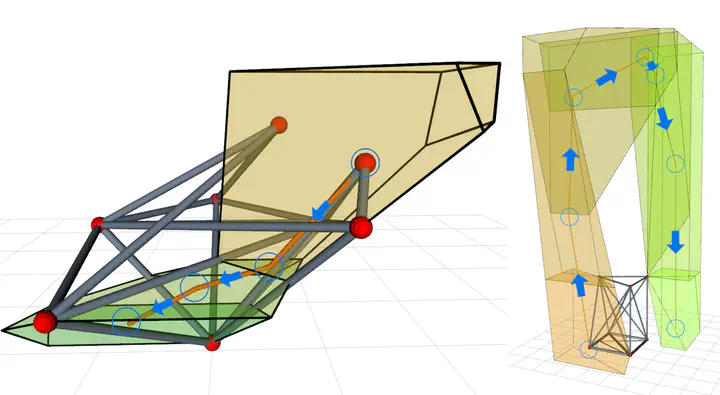
The Variable Topology Truss (VTT) is a new class of self-reconfigurable robot that can reconfigure its truss shape and topology depending on the task or environment requirements. Motion planning and avoiding self-collision are difficult as these systems usually have dozens of degrees-of-freedom with complex intersecting parallel actuation. There are two different types of shape changing actions for a VTT: geometry reconfiguration and topology reconfiguration. This paper focuses on the geometry reconfiguration actions. A new cell decomposition approach is presented based on a fast and complete method to compute the collision-free space of a node in a truss. A simple shape-morphing method is shown to quickly create motion paths for reconfiguration by moving one node at a time.
Chao Liu 刘超
Assistant Professor
My research interests include manipulation and tactile sensing, swarm and modular robotics, hybrid soft-rigid robotics, parallel robotics, control and motion planning.