Abstract
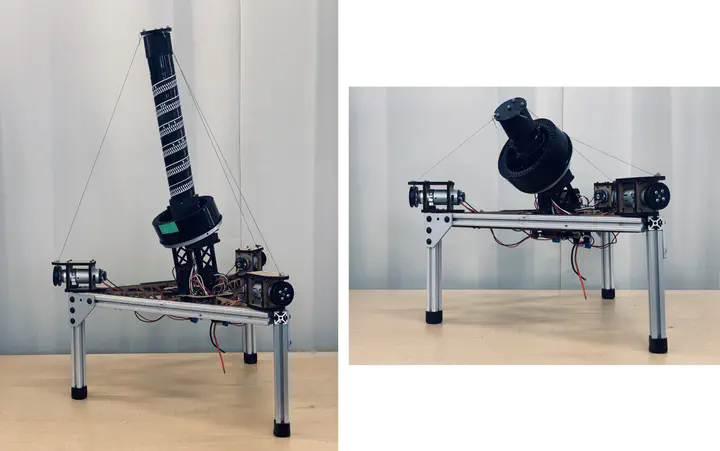
This paper presents a novel manipulator for aerial vehicles to perform grasping and manipulation tasks. The goal is to design a low-cost, relatively light but strong manipulator with a large workspace and compact storage space that can be mounted on an unmanned aerial system. A novel design solution based on the Spiral Zipper, an expanding tube, combined with tether actuators is presented. A model of the system is introduced and the control method and pose estimator are developed and tested with some experiments showing the reliable performance of the overall system. An experiment with a self-sealing suction cup gripper demonstrates manipulation while mounted on the aerial vehicle frame.
Chao Liu 刘超
Assistant Professor
My research interests include manipulation and tactile sensing, swarm and modular robotics, hybrid soft-rigid robotics, parallel robotics, control and motion planning.