A Distributed Reconfiguration Planning Algorithm for Modular Robots
Abstract
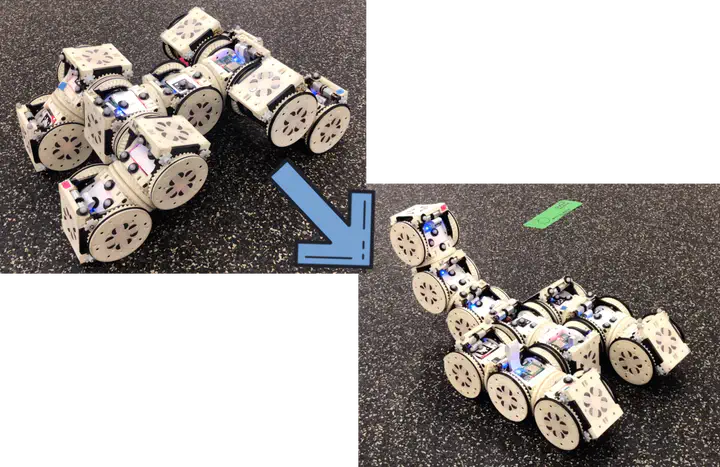
Self-reconfigurable modular robots are usually composed of multiple modules with uniform docking interfaces that can be transformed into different configurations by themselves. The reconfiguration planning problem is finding what sequence of reconfiguration actions are required for one arrangement of modules to transform into another. We present a novel reconfiguration planning algorithm for the SMORES form of modular robots. The algorithm compares the initial configuration with the goal configuration efficiently. The reconfiguration actions can be executed in a distributed manner so that each module can efficiently finish its reconfiguration task which results in a global reconfiguration for the system. In the end, the algorithm is demonstrated on the SMORES-EP self-reconfigurable modular robot hardware and some reconfiguration task examples are provided.
Chao Liu 刘超
Assistant Professor
My research interests include manipulation and tactile sensing, swarm and modular robotics, hybrid soft-rigid robotics, parallel robotics, control and motion planning.