Abstract
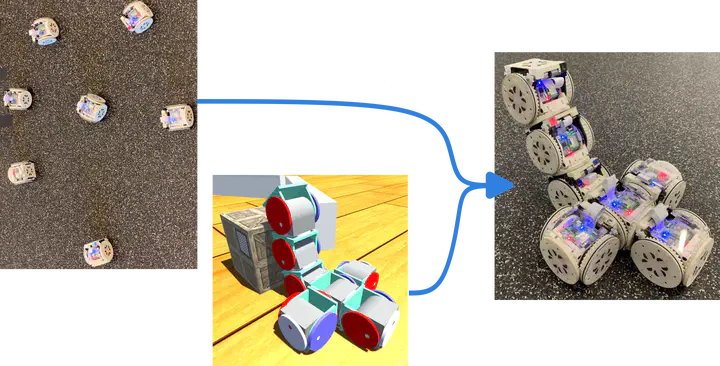
Self-assembly of modular robotic systems enables the construction of complex robotic configurations to adapt to different tasks. This paper presents a framework for SMORES types of modular robots to efficiently self-assemble into tree topologies. These modular robots form kinematic chains that have been shown to be capable of a large variety of manipulation and locomotion tasks, yet they can reconfigure using a mobile reconfiguration. A desired kinematic topology can be mapped onto a planar pattern with optimal module assignment based on the modules’ locations, then the mobile reconfiguration assembly process can be executed in parallel. A docking controller is developed to guarantee the success of docking processes. A hybrid control architecture is designed to handle a large number of modules and complex behaviors of each individual, and achieve efficient and robust self-assembly actions. The framework is demonstrated in both hardware and simulation on the SMORES-EP platform.
Chao Liu 刘超
Assistant Professor
My research interests include manipulation and tactile sensing, swarm and modular robotics, hybrid soft-rigid robotics, parallel robotics, control and motion planning.