A Low-Cost, Highly Customizable Solution for Position Estimation in Modular Robots
Abstract
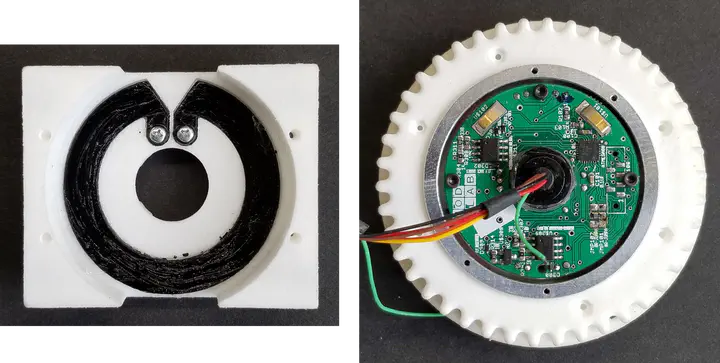
Accurate position sensing is important for state estimation and control in robotics. Reliable and accurate position sensors are usually expensive and difficult to customize. Incorporating them into systems that have very tight volume constraints such as modular robots are particularly difficult. PaintPots are low-cost, reliable, and highly customizable position sensors, but their performance is highly dependent on the manufacturing and calibration process. This paper presents a Kalman filter with a simplified observation model developed to deal with the non-linearity issues that result in the use of low-cost microcontrollers. In addition, a complete solution for the use of PaintPots in a variety of sensing modalities including manufacturing, characterization, and estimation is presented for an example modular robot, SMORES-EP. This solution can be easily adapted to a wide range of applications.
Chao Liu 刘超
Assistant Professor
My research interests include manipulation and tactile sensing, swarm and modular robotics, hybrid soft-rigid robotics, parallel robotics, control and motion planning.