A Quadratic Programming Approach to Manipulation in Real-Time Using Modular Robots
Abstract
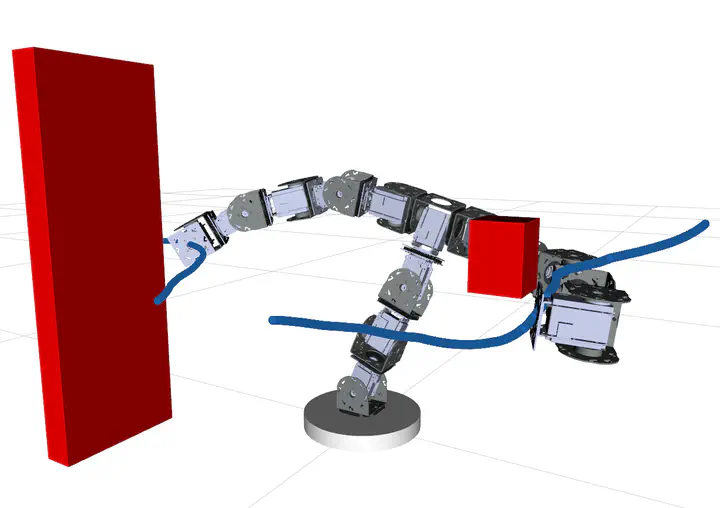
Motion planning in high-dimensional space is a challenging task. In order to perform dexterous manipulation in an unstructured environment, a robot with many degrees of freedom is usually necessary, which also complicates its motion planning problem. Real-time control brings about more difficulties in which robots have to maintain the stability while moving towards the target. Redundant systems are common in modular robots that consist of multiple modules and are able to transform into different configurations with respect to different needs. Different from robots with fixed geometry or configurations, the kinematics model of a modular robotic system can alter as the robot reconfigures itself, and developing a generic control and motion planning approach for such systems is difficult, especially when multiple motion goals are coupled. A new manipulation planning framework is developed in this paper. The problem is formulated as a sequential linearly constrained quadratic program (QP) that can be solved efficiently. Some constraints can be incorporated into this QP, including a novel way to approximate environment obstacles. This solution can be used directly for real-time applications or as an off-line planning tool, and it is validated and demonstrated on the CKBot and the SMORES-EP modular robot platforms.
Chao Liu 刘超
Assistant Professor
My research interests include manipulation and tactile sensing, swarm and modular robotics, hybrid soft-rigid robotics, parallel robotics, control and motion planning.