Chao Liu
Chao Liu
Home
Projects
Publications
Contact
PRIME Robotics Lab
Light
Dark
Automatic
Paper-Conference
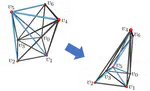
Motion Planning for Variable Topology Truss Modular Robot
Self-reconfigurable modular robots are composed of many modules that can be rearranged into various structures with respect to …
Chao Liu 刘超
,
Sencheng Yu
,
Mark Yim
PDF
Cite
Project
Video
DOI
Website
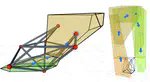
A Fast Configuration Space Algorithm for Variable Topology Truss Modular Robots
The Variable Topology Truss (VTT) is a new class of self-reconfigurable robot that can reconfigure its truss shape and topology …
Chao Liu 刘超
,
Sencheng Yu
,
Mark Yim
PDF
Cite
Project
Video
DOI
Website
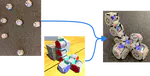
Parallel Self-assembly with SMORES-EP, a Modular Robot
Chao Liu 刘超
,
Qian Lin
,
Hyun Kim
,
Mark Yim
PDF
Cite
Project
Video
Website
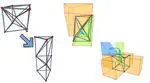
Reconfiguration Motion Planning for Variable Topology Truss
This paper presents an algorithm to do motion planning for a new class of self-reconfigurable modular robot: the variable topology …
Chao Liu 刘超
,
Mark Yim
PDF
Cite
Project
Video
DOI
Website
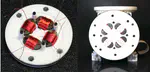
Spiral Zipper Manipulator for Aerial Grasping and Manipulation
This paper presents a novel manipulator for aerial vehicles to perform grasping and manipulation tasks. The goal is to design a …
Chao Liu 刘超
,
Abhraneel Bera
,
Thulani Tsabedze
,
Daniel Edgar
,
Mark Yim
PDF
Cite
Project
Video
DOI
Website
Toward Lateral Aerial Grasping Manipulation Using Scalable Suction
This paper is an initial step toward the realization of an aerial robot that can perform lateral physical work, such as drilling a hole …
Chad C. Kessens
,
Matthew Horowitz
,
Chao Liu 刘超
,
James Dotterweich
,
Mark Yim
,
Harris L. Edge
PDF
Cite
Project
DOI
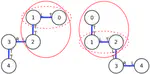
Configuration Recognition with Distributed Information for Modular Robots
Modular robots are usually composed of multiple blocks with uniform docking interfaces that can be transformed into different …
Chao Liu 刘超
,
Mark Yim
PDF
Cite
Project
DOI
Website
PaintPots: Low Cost, Accurate, Highly Customizable Potentiometers for Position Sensing
The PaintPot manufacturing process is a new way to create low-cost, low-profile, highly customizable potentiometers for position …
Tarik Tosun
,
Daniel Edgar
,
Chao Liu 刘超
,
Thulani Tsabedze
,
Mark Yim
PDF
Cite
Project
DOI
Website
Design and Characterization of the EP-Face Connector
We present the EP-Face connector, a novel connector for hybrid chain-lattice type modular robots that is high-strength (88.4N), …
Tarik Tosun
,
Jay Davey
,
Chao Liu 刘超
,
Mark Yim
PDF
Cite
Project
DOI
Website
«
Cite
×