Chao Liu
Chao Liu
Home
Projects
Publications
Contact
PRIME Robotics Lab
Light
Dark
Automatic
Paper-Conference
Learning Object Properties Using Robot Proprioception via Differentiable Robot-Object Interaction
Differentiable simulation has become a powerful tool for system identification. While prior work has focused on identifying robot …
Peter Yichen Chen
,
Chao Liu 刘超
,
Pingchuan Ma
,
John Eastman
,
Daniela Rus
,
Dylan Randle
,
Yuri Ivanov
,
Wojciech Matusik
PDF
Cite
Code
Project
Thin-Shell Object Manipulations with Differentiable Physics Simulations
In this work, we aim to teach robots to manipulate various thin-shell materials. Prior works studying thin-shell object manipulation …
Yian Wang
,
Juntian Zheng
,
Zhehuan Chen
,
Xian Zhou
,
Gu Zhang
,
Chao Liu 刘超
,
Chuang Gan
PDF
Cite
Project
Website
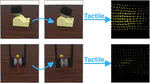
Learning to Jointly Understand Visual and Tactile Signals
Modeling and analyzing object and shape has been well studied in the past. However, manipulation of these complex tools and articulated …
Yichen Li
,
Yilun Du
,
Chao Liu 刘超
,
Chao Liu
,
Francis Williams
,
Michael Foshey
,
Benjamin Eckart
,
Jan Kautz
,
Joshua B. Tenenbaum
,
Antonio Torralba
,
Wojciech Matusik
PDF
Cite
Project
Website
DiffTactile: A Physics-Based Differentiable Tactile Simulator for Contact-Rich Robotic Manipulation
We introduce DIFFTACTILE, a physics-based differentiable tactile simulation system designed to enhance robotic manipulation with dense …
Zilin Si
,
Gu Zhang
,
Qingwei Ben
,
Xian Zhou
,
Branden Romero
,
Chao Liu 刘超
,
Chuang Gan
PDF
Cite
Project
Website
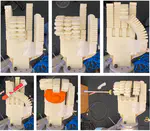
Directly 3D Printed, Pneumatically Actuated Multi-Material Robotic Hand
Soft robotic manipulators with many degrees of freedom can carry out complex tasks safely around humans. However, manufacturing of soft …
Hanna Matusik
,
Chao Liu 刘超
,
Daniela Rus
PDF
Project
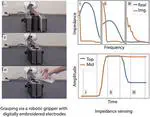
Liquids Identification and Manipulation via Digitally Fabricated Impedance Sensors
Despite recent exponential advancements in computer vision and reinforcement learning, it remains challenging for robots to interact …
Junyi Zhu
,
Young Joong Lee
,
Yiyue Luo
,
Tianyu Xu
,
Chao Liu 刘超
,
Daniela Rus
,
Stefanie Mueller
,
Wojciech Matusik
Cite
Project
DOI
Towards Cooperative Flight Control Using Visual-Attention
The cooperation of a human pilot with an autonomous agent during flight control realizes parallel autonomy. We propose an air-guardian …
Lianhao Yin
,
Makram Chahine
,
Tsun-Hsuan Wang
,
Tim Seyde
,
Chao Liu 刘超
,
Mathias Lechner
,
Ramin Hasani
,
Daniela Rus
PDF
Cite
A Modular Bio-inspired Robotic Hand with High Sensitivity
While parallel grippers and multi-fingered robotic hands are well developed and commonly used in structured settings, it remains a …
Chao Liu 刘超
,
Andrea Moncada
,
Hanna Matusik
,
Deniz Irem Erus
,
Daniela Rus
Cite
Project
Video
DOI
ActionSense: A Multimodal Dataset for Human Activities Using Wearable Sensors in a Kitchen Environment
This paper introduces ActionSense, a multimodal dataset and recording framework with an emphasis on wearable sensing in a kitchen …
Joseph DelPreto
,
Chao Liu 刘超
,
Yiyue Luo
,
Michael Foshey
,
Yunzhu Li
,
Antonio Torralba
,
Wojciech Matusik
,
Daniela Rus
PDF
Cite
Project
Website
A Quadratic Programming Approach to Modular Robot Control and Motion Planning
Modular robotic systems consist of multiple modules that can be transformed into different configurations with respect to different …
Chao Liu 刘超
,
Mark Yim
PDF
Cite
Project
Video
DOI
Website
»
Cite
×