Chao Liu
Chao Liu
Home
Projects
Publications
Contact
PRIME Robotics Lab
Light
Dark
Automatic
Article-Journal
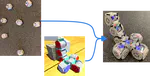
Controlling diverse robots by inferring Jacobian fields with deep networks
Mirroring the complex structures and diverse functions of natural organisms is a long-standing challenge in robotics. Modern …
Sizhe Lester Li
,
Annan Zhang
,
Boyuan Chen
,
Hanna Matusik
,
Chao Liu 刘超
,
Daniela Rus
,
Vincent Sitzmann
PDF
Cite
Project
Video
Website
Adaptive Tactile Interaction Transfer via Digitally Embroidered Smart Gloves
Human-machine interfaces for capturing, conveying, and sharing tactile information across time and space hold immense potential for …
Yiyue Luo
,
Chao Liu 刘超
,
Young Joong Lee
,
Joseph DelPreto
,
Kui Wu
,
Michael Foshey
,
Daniela Rus
,
Tomás Palacios
,
Yunzhu Li
,
Antonio Torralba
,
Wojciech Matusik
Cite
Project
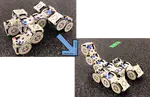
SMORES-EP, a Modular Robot with Parallel Self-assembly
Self-assembly of modular robotic systems enables the construction of complex robotic configurations to adapt to different tasks. This …
Chao Liu 刘超
,
Qian Lin
,
Hyun Kim
,
Mark Yim
PDF
Cite
Project
DOI
Website
Motion Planning for Variable Topology Trusses: Reconfiguration and Locomotion
Truss robots are highly redundant parallel robotic systems that can be applied in a variety of scenarios. The variable topology truss …
Chao Liu 刘超
,
Sencheng Yu
,
Mark Yim
PDF
Cite
Project
Video
DOI
Website
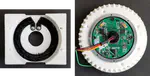
A Low-Cost, Highly Customizable Solution for Position Estimation in Modular Robots
Accurate position sensing is important for state estimation and control in robotics. Reliable and accurate position sensors are usually …
Chao Liu 刘超
,
Tarik Tosun
,
Mark Yim
PDF
Cite
Project
DOI
Website
A Quadratic Programming Approach to Manipulation in Real-Time Using Modular Robots
Motion planning in high-dimensional space is a challenging task. In order to perform dexterous manipulation in an unstructured …
Chao Liu 刘超
,
Mark Yim
PDF
Cite
Project
Video
DOI
Website
A Distributed Reconfiguration Planning Algorithm for Modular Robots
Self-reconfigurable modular robots are usually composed of multiple modules with uniform docking interfaces that can be transformed …
Chao Liu 刘超
,
Michael Whitzer
,
Mark Yim
PDF
Cite
Project
Video
DOI
Website
Cite
×