Chao Liu
Chao Liu
Home
Projects
Publications
Contact
Light
Dark
Automatic
1
Thin-Shell Object Manipulations with Differentiable Physics Simulations
Yian Wang
,
Juntian Zheng
,
Zhehuan Chen
,
Xian Zhou
,
Gu Zhang
,
Chao Liu
,
Chuang Gan
PDF
Cite
Project
Website
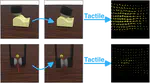
Learning to Jointly Understand Visual and Tactile Signals
Yichen Li
,
Yilun Du
,
Chao Liu
,
Chao Liu
,
Francis Williams
,
Michael Foshey
,
Benjamin Eckart
,
Jan Kautz
,
Joshua B. Tenenbaum
,
Antonio Torralba
,
Wojciech Matusik
PDF
Cite
Project
Website
DiffTactile: A Physics-Based Differentiable Tactile Simulator for Contact-Rich Robotic Manipulation
Zilin Si
,
Gu Zhang
,
Qingwei Ben
,
Xian Zhou
,
Branden Romero
,
Chao Liu
,
Chuang Gan
PDF
Cite
Project
Website
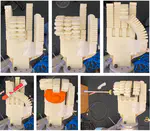
Directly 3D Printed, Pneumatically Actuated Multi-Material Robotic Hand
Soft robotic manipulators with many degrees of freedom can carry out complex tasks safely around humans. However, manufacturing of soft …
Hanna Matusik
,
Chao Liu
,
Daniela Rus
PDF
Project
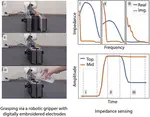
Liquids Identification and Monitoring via Digitally Fabricated Impedance Sensors
Despite recent exponential advancements in computer vision and reinforcement learning, it remains challenging for robots to interact …
Junyi Zhu
,
Young Joong Lee
,
Yiyue Luo
,
Tianyu Xu
,
Chao Liu
,
Daniela Rus
,
Stefanie Mueller
,
Wojciech Matusik
Project
Towards Cooperative Flight Control Using Visual-Attention
The cooperation of a human pilot with an autonomous agent during flight control realizes parallel autonomy. We propose an air-guardian …
Lianhao Yin
,
Makram Chahine
,
Tsun-Hsuan Wang
,
Tim Seyde
,
Chao Liu
,
Mathias Lechner
,
Ramin Hasani
,
Daniela Rus
PDF
Cite
A Modular Bio-inspired Robotic Hand with High Sensitivity
While parallel grippers and multi-fingered robotic hands are well developed and commonly used in structured settings, it remains a …
Chao Liu
,
Andrea Moncada
,
Hanna Matusik
,
Deniz Irem Erus
,
Daniela Rus
Cite
Project
Video
DOI
ActionSense: A Multimodal Dataset for Human Activities Using Wearable Sensors in a Kitchen Environment
This paper introduces ActionSense, a multimodal dataset and recording framework with an emphasis on wearable sensing in a kitchen …
Joseph DelPreto
,
Chao Liu
,
Yiyue Luo
,
Michael Foshey
,
Yunzhu Li
,
Antonio Torralba
,
Wojciech Matusik
,
Daniela Rus
PDF
Cite
Dataset
Project
Website
A Quadratic Programming Approach to Modular Robot Control and Motion Planning
Modular robotic systems consist of multiple modules that can be transformed into different configurations with respect to different …
Chao Liu
,
Mark Yim
PDF
Cite
Project
Video
DOI
Website
Motion Planning for Variable Topology Truss Modular Robot
Self-reconfigurable modular robots are composed of many modules that can be rearranged into various structures with respect to …
Chao Liu
,
Sencheng Yu
,
Mark Yim
PDF
Cite
Project
Video
DOI
Website
»
Cite
×