Soft Material Modeling
Nov 5, 2023
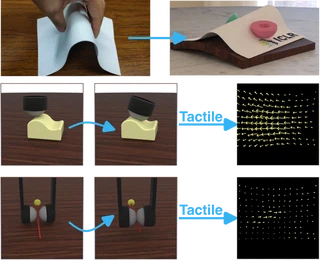
Modeling soft materials is challenging. Collaborating with MIT-IBM Watson AI Lab, we presented a fully differentiable simulation platform for thin-shell object manipulation tasks (e.g., papers) and a differentiable simulation environment for vision-based tactile sensors (e.g., GelSight) for learning robotic skills.

Authors
Chao Liu
(he/him)
Assistant Professor
Assistant Professor@UBC Vancouver, Postdoc@MIT CSAIL, PhD@UPenn GRASP