Whole-Body Motion Control in Real Time
Jul 7, 2021
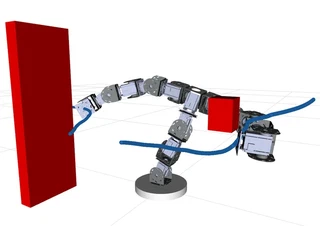
We present a real-time control and planning framework to handle dexterous manipulation tasks that is demonstrated on SMORES-EP and CKBot modular robotic systems.

Authors
Chao Liu
(he/him)
Assistant Professor
Assistant Professor@UBC Vancouver, Postdoc@MIT CSAIL, PhD@UPenn GRASP