ActionSense
Oct 17, 2022
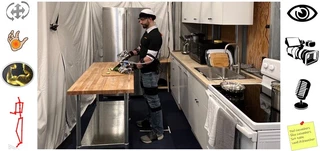
ActionSense is a multimodal dataset for human activities using wearable sensors in a kitchen environment.

Authors
Chao Liu
(he/him)
Assistant Professor
Assistant Professor@UBC Vancouver, Postdoc@MIT CSAIL, PhD@UPenn GRASP
ActionSense is a multimodal dataset for human activities using wearable sensors in a kitchen environment.