Variable Topology Truss
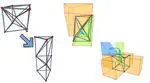
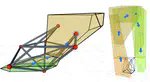
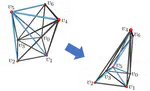
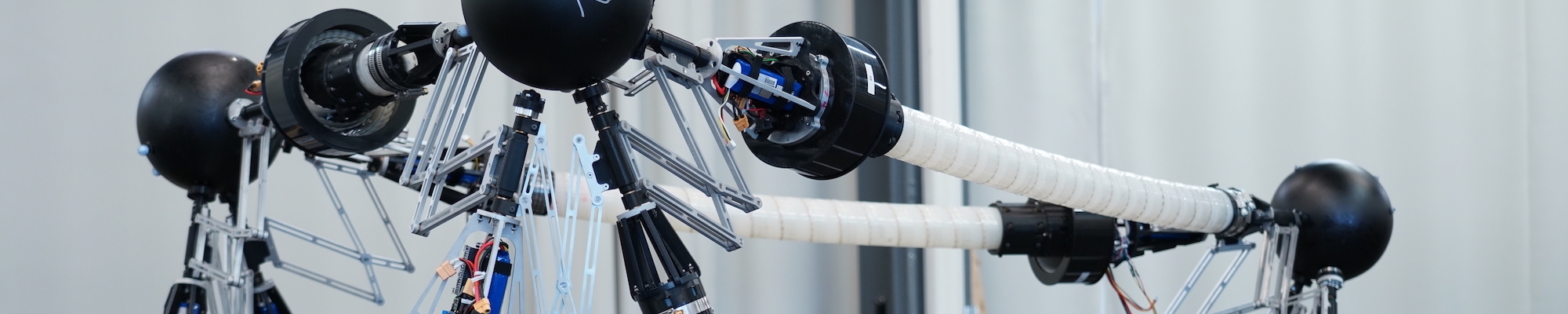
Variable Topology Trusses (VTT) are hyper-redundant parallel robots. A VTT consists of linear actuators for the truss members, which are joined at the truss nodes by a special reconfigurable spherical joint. A VTT can significantly change its shape and size, reconfigure by merging and splitting these truss nodes, and execute rolling locomotion.
Chao Liu 刘超
Assistant Professor
My research interests include manipulation and tactile sensing, swarm and modular robotics, hybrid soft-rigid robotics, parallel robotics, control and motion planning.