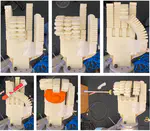
Robotic Manipulation
We developed novel dexterous robotic hands and control algorithms aiming for human-level manipulation and grasping skills.
Chao Liu 刘超
Assistant Professor
My research interests include manipulation and tactile sensing, swarm and modular robotics, hybrid soft-rigid robotics, parallel robotics, control and motion planning.