Whole-Body Motion Control in Real Time
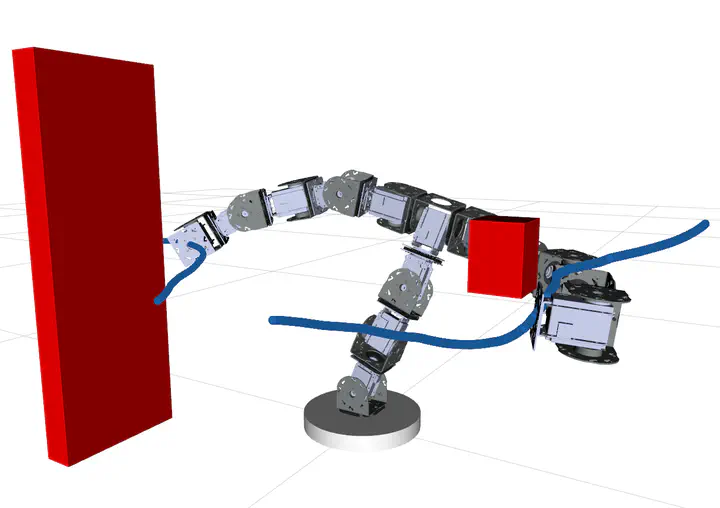
We present a real-time control and planning framework to handle dexterous manipulation tasks that is demonstrated on SMORES-EP and CKBot modular robotic systems.
Chao Liu 刘超
Assistant Professor
My research interests include manipulation and tactile sensing, swarm and modular robotics, hybrid soft-rigid robotics, parallel robotics, control and motion planning.

