Chao Liu
Chao Liu
Home
Projects
Publications
Contact
PRIME Robotics Lab
Light
Dark
Automatic
Projects
Machine Perception
Advanced proprioceptive and exteroceptive sensing approaches for robot control.
Soft Material Modeling
Simulation engines of soft materials for manipulation tasks.
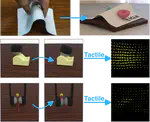
Textile-based Sensing and Actuation
Textile-based digital fabrication for sensing and actuation.
Robotic Manipulation
Bio-inspired dexterous robotic hands and human-level manipulation skill imitation.
ActionSense
A multimodal dataset for human activities
Whole-Body Motion Control in Real Time
Control and planning for dexterous manipulation in real time.
SMORES-EP
SMORES-EP, a hybrid swarm and modular robotic system.
Variable Topology Truss
Variable Topology Truss robots are hyper-redundant parallel modular robots.
Aerial Manipulation
A novel manipulator for aerial manipulation.
Cite
×