
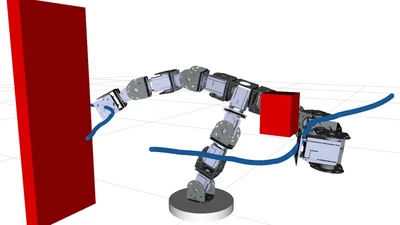
Machine Perception
Advanced proprioceptive and exteroceptive sensing approaches for robot control.
I am an Assistant Professor in the Department of Mechanical Engineering and an Associate Member in the Department of Computer Science at The University of British Columbia in Vancouver. Previously, I was a Postdoctoral Associate at MIT CSAIL working with Professor Daniela Rus. I obtained my Ph.D. degree from the University of Pennsylvania advised by Professor Mark Yim (ModLab in UPenn GRASP Lab).
My lab PRIME Robotics at UBC is actively recruiting postdoctoral researchers, graduate and undergraduate students, and visiting scholars who are passionate about robotics. More information can be found here. Feel free to reach out and please follow the instructions if you are interested in joining my group.
Advanced proprioceptive and exteroceptive sensing approaches for robot control.

Textile-based digital fabrication for sensing and actuation.

Bio-inspired dexterous robotic hands and human-level manipulation skill imitation.

Control and planning for dexterous manipulation in real time.
